7 численных экспериментов проверяют физическую модель CR3BP и точность интеграторов. Все результаты воспроизводимы из исходного кода.
Эксперимент
Ключевой результат
01 Дрейф Якоби
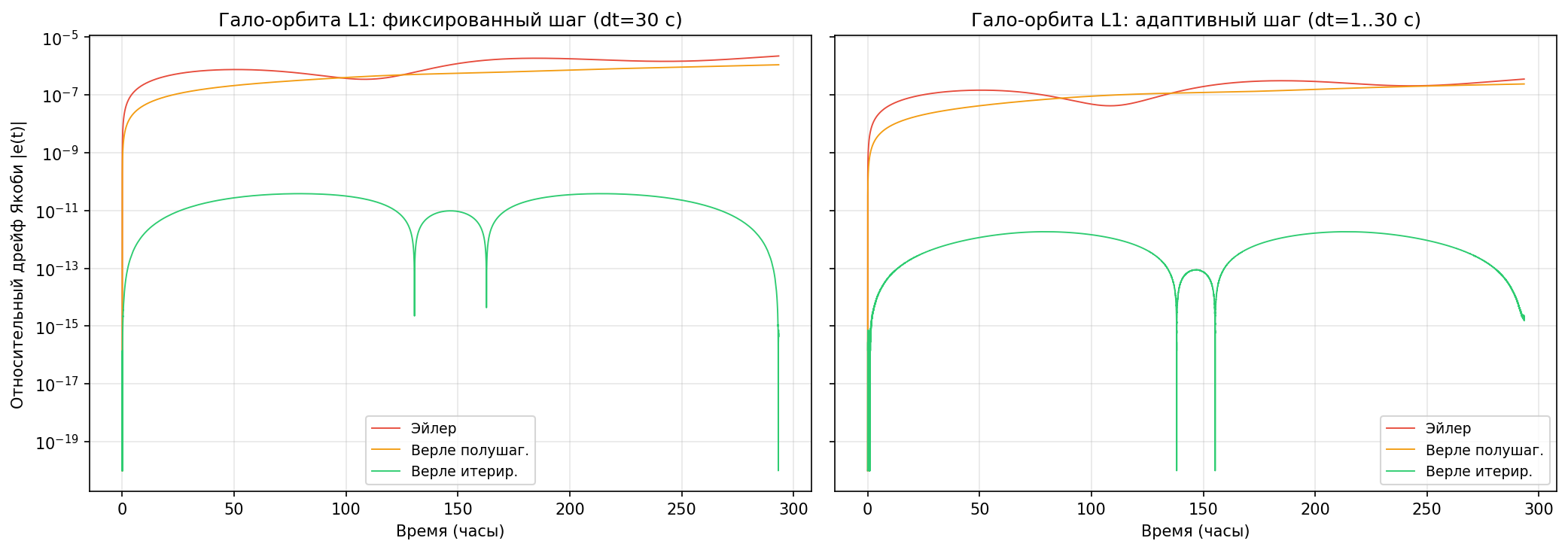
Итерированный Верле сохраняет интеграл Якоби с точностью 10−11 — на 5 порядков лучше Эйлера
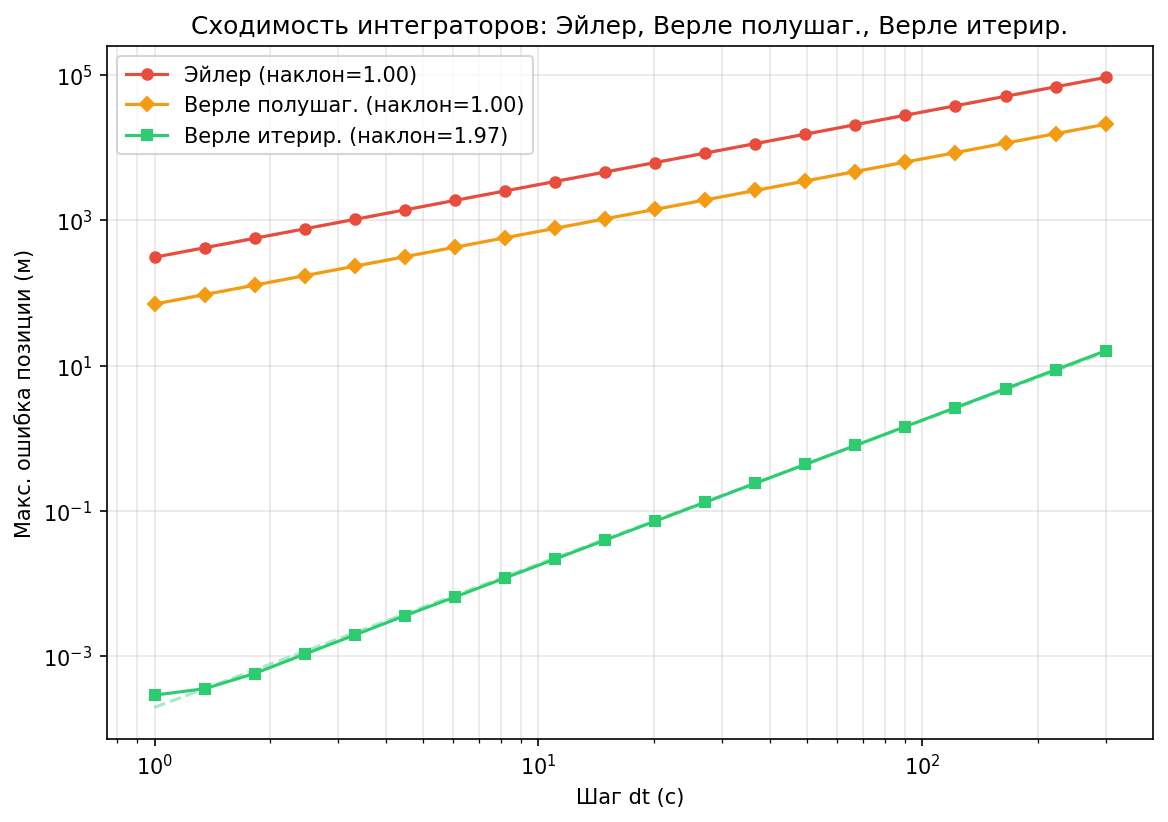
02 Сходимость (log-log)
Итерированный Верле: O(h²), ошибка 0.13 м при dt=30 с — в 49 000× точнее Эйлера
03 Точки Лагранжа
L1–L5 найдены численно; аналитические приближения дают отн. ошибку 0.4–0.8%
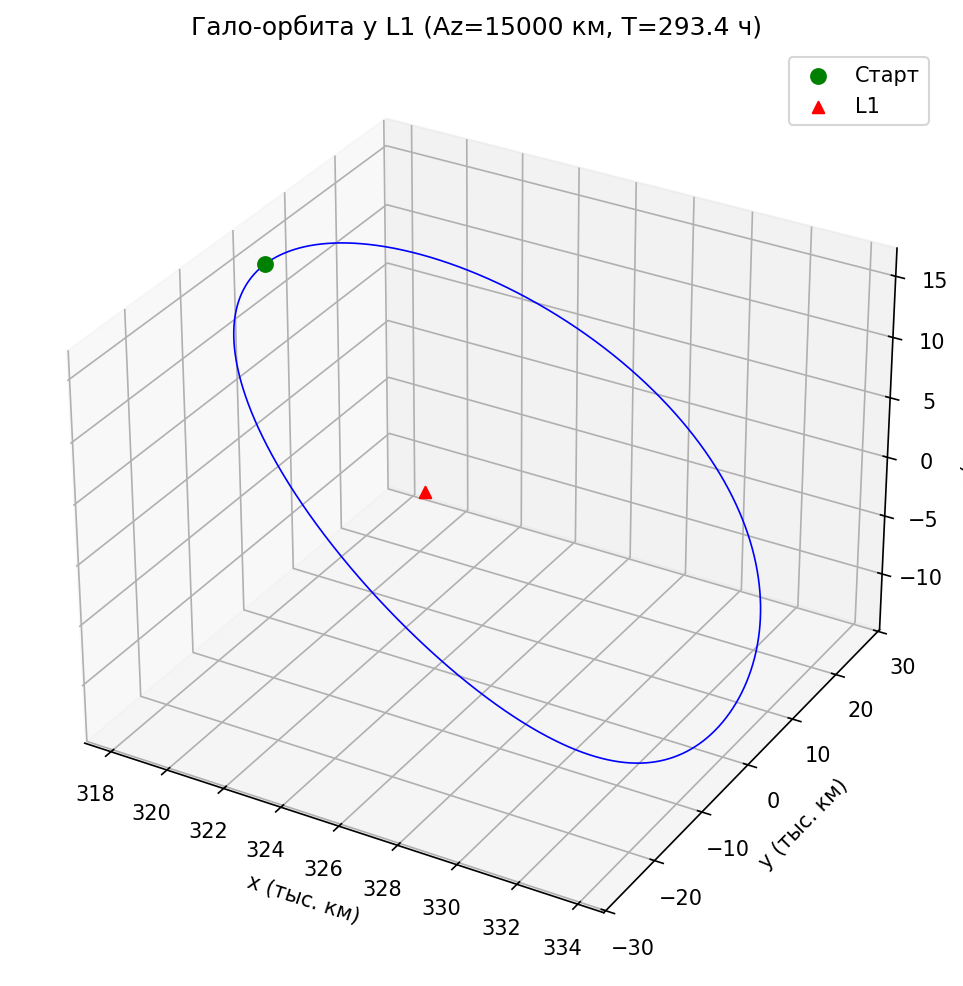
04 Гало-орбита
Периодическая 3D-орбита у L1: период 12.2 дня, ошибка замыкания 3.6 км
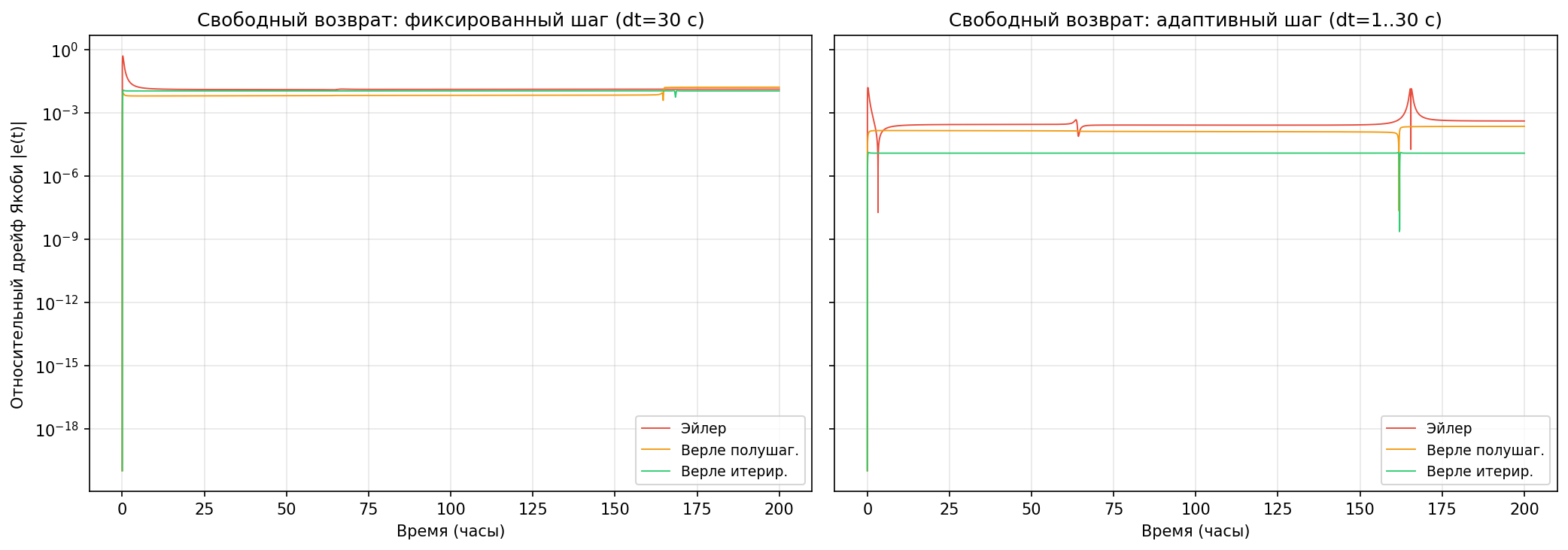
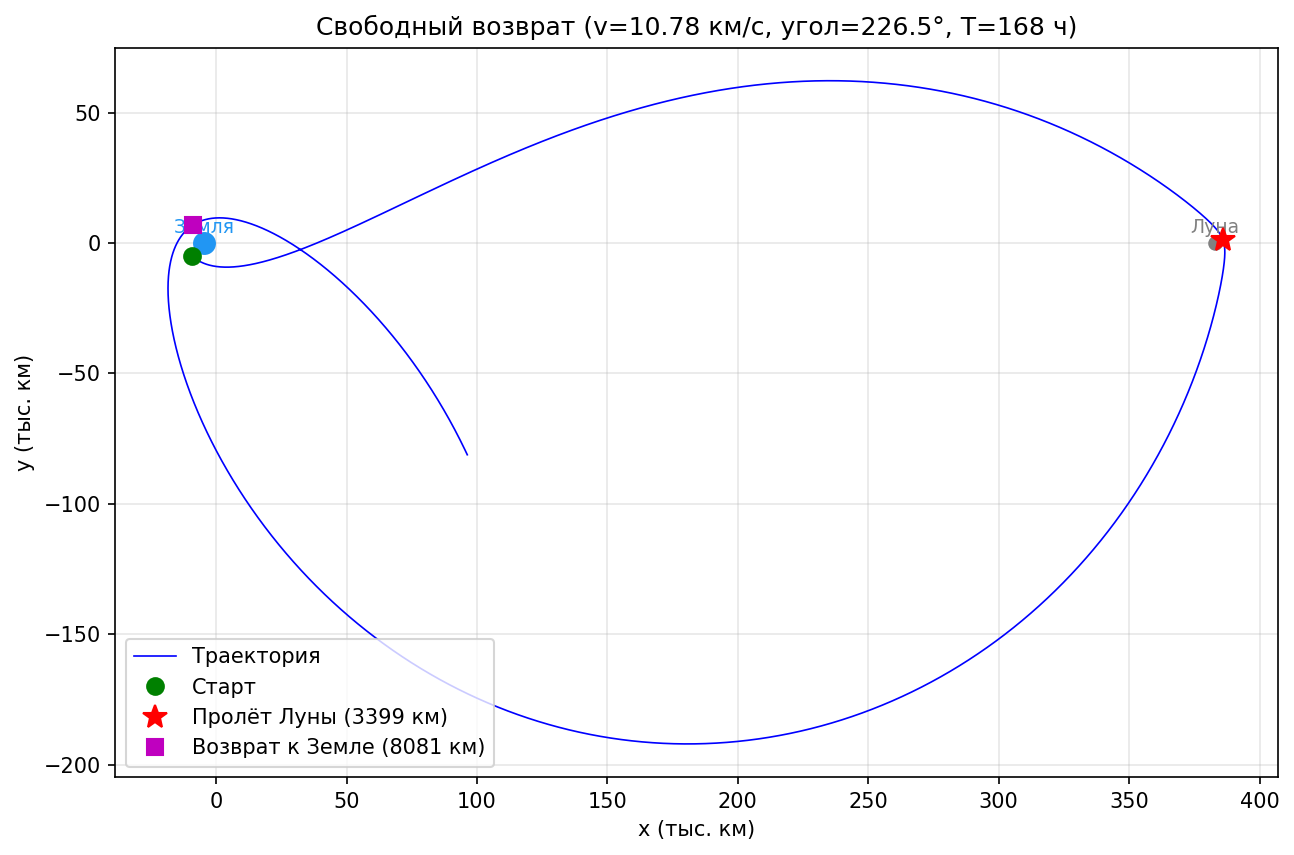
05 Свободный возврат
Баллистический облёт Луны (3 399 км) и возврат к Земле (8 081 км) за 168 ч
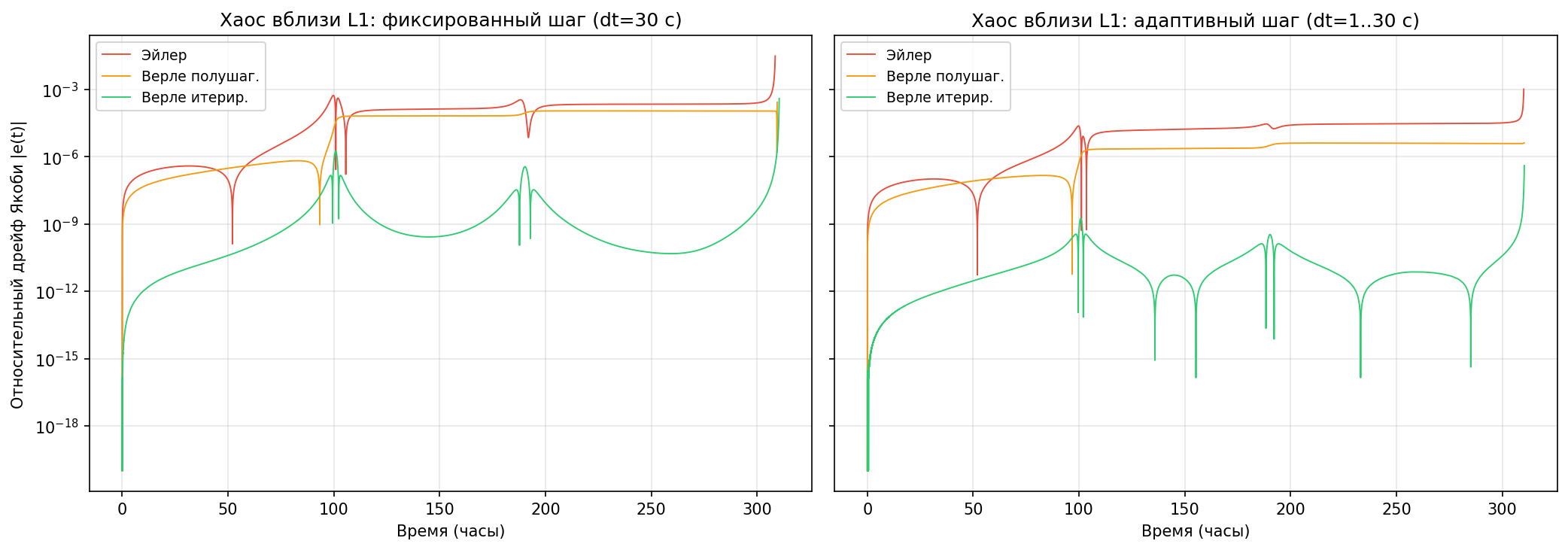
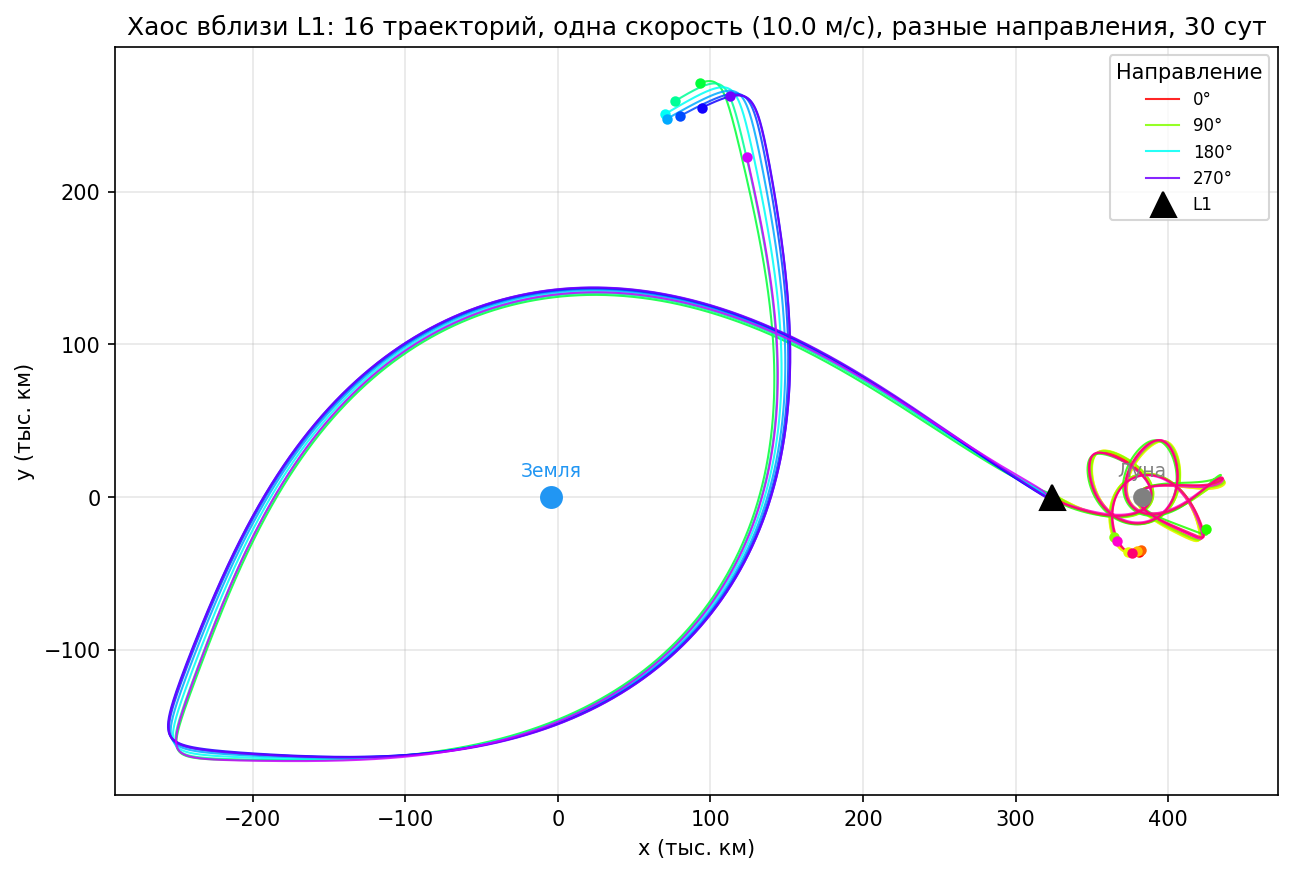
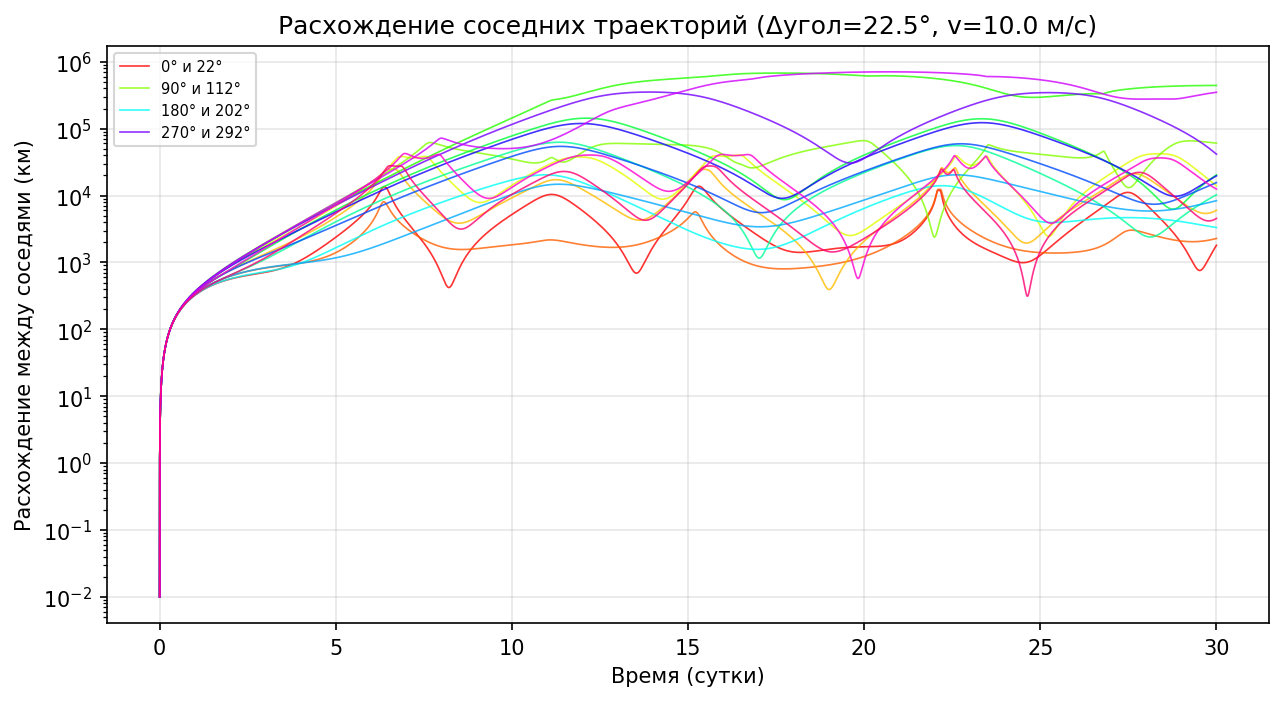
06 Хаос вблизи L1
16 траекторий с одинаковой скоростью — два кластера судеб: лунные и земные
07 Малая тяга
Импульс 0.72 м/с у L1 уводит аппарат на 101 000 км — хаотическая чувствительность
Дрейф интеграла Якоби
Интеграл Якоби CJ — единственная сохраняющаяся величина в CR3BP. Его дрейф — прямая мера точности интегратора. Сравниваются 3 интегратора × 2 режима шага на трёх сценариях.
Конфигурация
Гало-орбита
Своб. возврат
Хаос L1
Эйлер фикс.
2.22×10−6
4.84×10−1
3.12×10−2
Эйлер адапт.
3.53×10−7
1.53×10−2
1.04×10−3
Верле полушаг. фикс.
1.10×10−6
1.60×10−2
2.70×10−4
Верле полушаг. адапт.
2.39×10−7
2.21×10−4
4.15×10−6
Верле итерир. фикс.
3.83×10−11
1.15×10−2
3.98×10−4
Верле итерир. адапт.
1.85×10−12
1.27×10−5
4.04×10−7
Сходимость интеграторов (log-log)
Ошибка позиции относительно scipy RK45 при интеграции гало-орбиты 100 ч. Полушаговый Верле деградирует до O(h) из-за силы Кориолиса; итерированный Верле восстанавливает O(h²).
Интегратор
Наклон
Ошибка при dt=30 с
Отн. ошибка (d/dЗЛ)
Эйлер
1.00
8 400 м
2.2×10−5
Верле полушаговый
1.00
1 900 м
4.9×10−6
Верле итерированный
1.97
0.13 м
3.4×10−10
Точки Лагранжа L1–L5
Численное вычисление точек Лагранжа (бисекция / Ньютон) и сравнение с аналитическими приближениями (сфера Хилла).
Точка
x, км
y, км
Ошибка, км
Отн. ошибка
L1
323 696
0
2 649
0.82%
L2
446 531
0
1 977
0.44%
L3
−386 651
0
2 779
0.72%
L4
188 080
332 920
2 812
0.74%
L5
188 080
−332 920
2 812
0.74%
Остаточное ускорение в найденных точках: < 10−18 м/с².
Баллистическая траектория типа Apollo-13: старт с LEO, облёт Луны, возврат к Земле без использования двигателя.
Параметр
Значение
Угол старта
226.5°
Скорость TLI (выход на лунную трассу)
10 779 м/с
Пролёт Луны
3 399 км (t = 63.6 ч)
Возврат к Земле
8 081 км (t = 168.1 ч)
Хаотическая чувствительность вблизи L1
16 траекторий стартуют из L1 с одинаковой скоростью 10 м/с, но в разных направлениях. Одна скорость — качественно разные судьбы.
Часть траекторий уходит к Луне (~380 тыс. км), часть совершает петлю вокруг Земли (~80–120 тыс. км). Расхождение экспоненциальное.
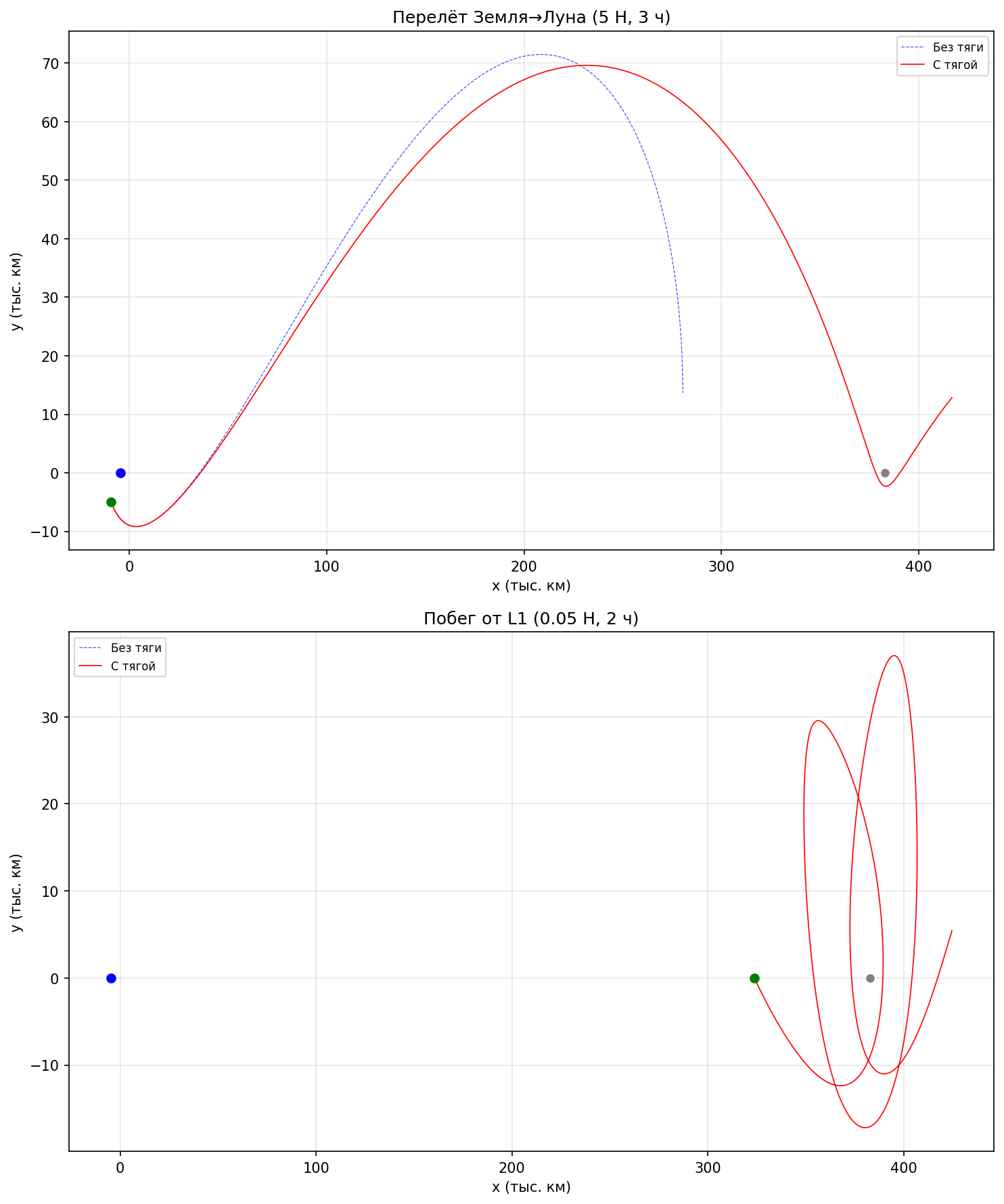
Влияние малой тяги на траекторию
Даже малая тяга (<1% начальной скорости) кардинально меняет траекторию в CR3BP.
Сценарий
Δv (набор скорости за манёвр)
Результат
Земля → Луна (5 Н, 3 ч)
108 м/с
Пролёт Луны: 2 494 км
Побег от L1 (0.05 Н, 2 ч)
0.72 м/с
Уход на 101 000 км
Δv — суммарное приращение скорости от работы двигателя. Показывает, насколько малый импульс нужен для качественного изменения траектории в окрестности точек либрации.